Double-Link Inverted Pendulum
The double-link inverted pendulum is spans mechanical design, embedded systems, and controls. Two links are coupled though revolute joints, fixed with an AS5600 magnetic encoder for precice angle measurement. The cart rides a linear rail, and a Raspberry Pi 5 handles real-time state estimation.
- June 5, 2026 · 11:36 AM
If Praxis 2 taught me anything, its to explore the scope of the project before starting. I was looking around at previous papers on inverted pendulums, and I found one by researchers at Inha Univeristy: Transition Control of a Double-Inverted Pendulum System Using Sim2Real Reinforcement Learning. This was perfect for my project, and I am going to take direct inspiration from this paper in this project. The first goal was to design a join with a rotary encoder & slip ring.
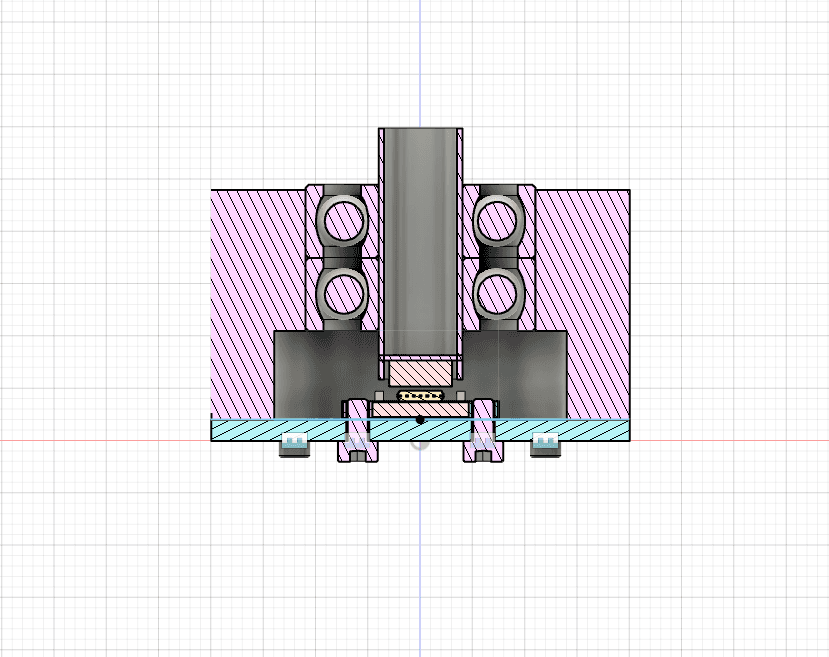
The following was designed in Fusion360. It was designed so that a magnet would hover ~1mm above the encoder, the optimal distance. As this joint would be placed at the bottom, the joint itself would not require a slip ring, it can be placed on the cart itself. The encoder wire will pass through the 608-2RS bearing through the revolute joint, and through the arm.